# Modern Control
Normally speaking, we know much about classical control, in the form
of:
$$
\dot{x}(t) = ax(t) + bu(t) \longleftrightarrow sX(s) - x(0) = aX(S) + bU(s)
$$
With the left part being a derivative equation in continuous time, while the
right being its tranformation in the complex domain field.
> [!NOTE]
>
> $\dot{x}(t) = ax(t) + bu(t) \longleftrightarrow x(k+1) = ax(k) + bu(k)$
>
> These are equivalent, but the latter one is in discrete time.
>
## A brief recap over Classical Control
Be $Y(s)$ our `output variable` in `classical control` and $U(s)$ our
`input variable`. The associated `transfer function` $G(s)$ is:
$$
G(s) = \frac{Y(s)}{U(s)}
$$
### Root Locus
### Bode Diagram
### Nyquist Diagram
## State Space Representation
### State Matrices
A state space representation has 4 Matrices: $A, B, C, D$ with coefficients in
$\R$:
- $A$: State Matrix `[x_rows, x_columns]`
- $B$: Input Matrix `[x_rows, u_columns]`
- $C$: Output Matrix `[y_rows, x_columns]`
- $D$: Direct Coupling Matrix `[y_rows, u_columns]`
$$
\begin{cases}
\dot{x}(t) = Ax(t) + Bu(t) \;\;\;\; \text{Dynamic of the system}\\
y(t) = C{x}(t) + Du(t) \;\;\;\; \text{Static of the outputs}
\end{cases}
$$
This can be represented with the following diagrams:
#### Continuous Time:
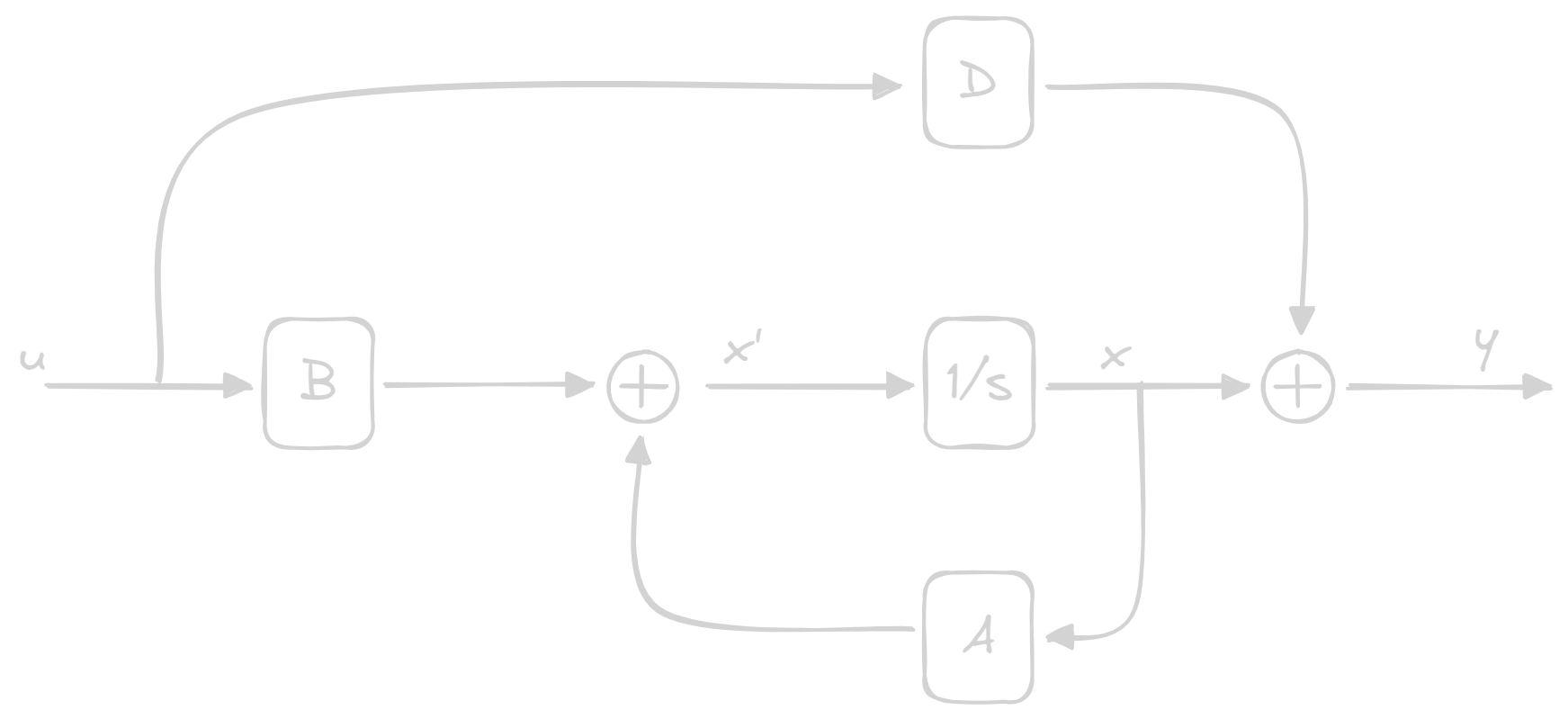
---
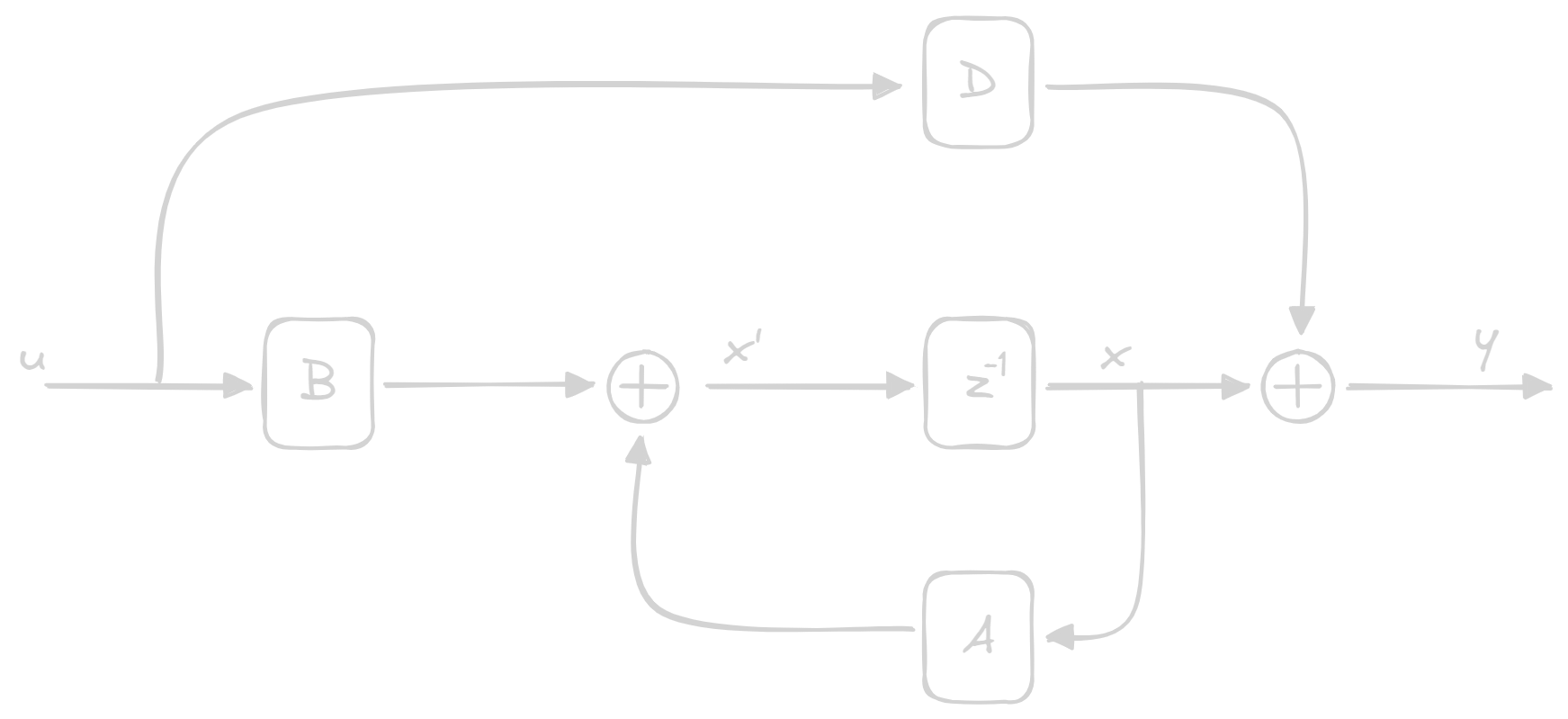
#### Discrete time:
### State Vector
This is a state vector `[x_rows, 1]`:
$$
x(t) = \begin{bmatrix}
x_1(t)\\
\dots\\
x_x(t)
\end{bmatrix}
\text{or} \:
x(k) = \begin{bmatrix}
x_1(k)\\
\dots\\
x_x(k)
\end{bmatrix}
$$
Basically, from this we can know each next step of the state vector, represented
as:
$$
x(k + 1) = f\left(
x(k), u(k)
\right) = Ax(k) + Bu(k)
$$
### Examples
#### Cart attached to a spring and a damper, pulled by a force
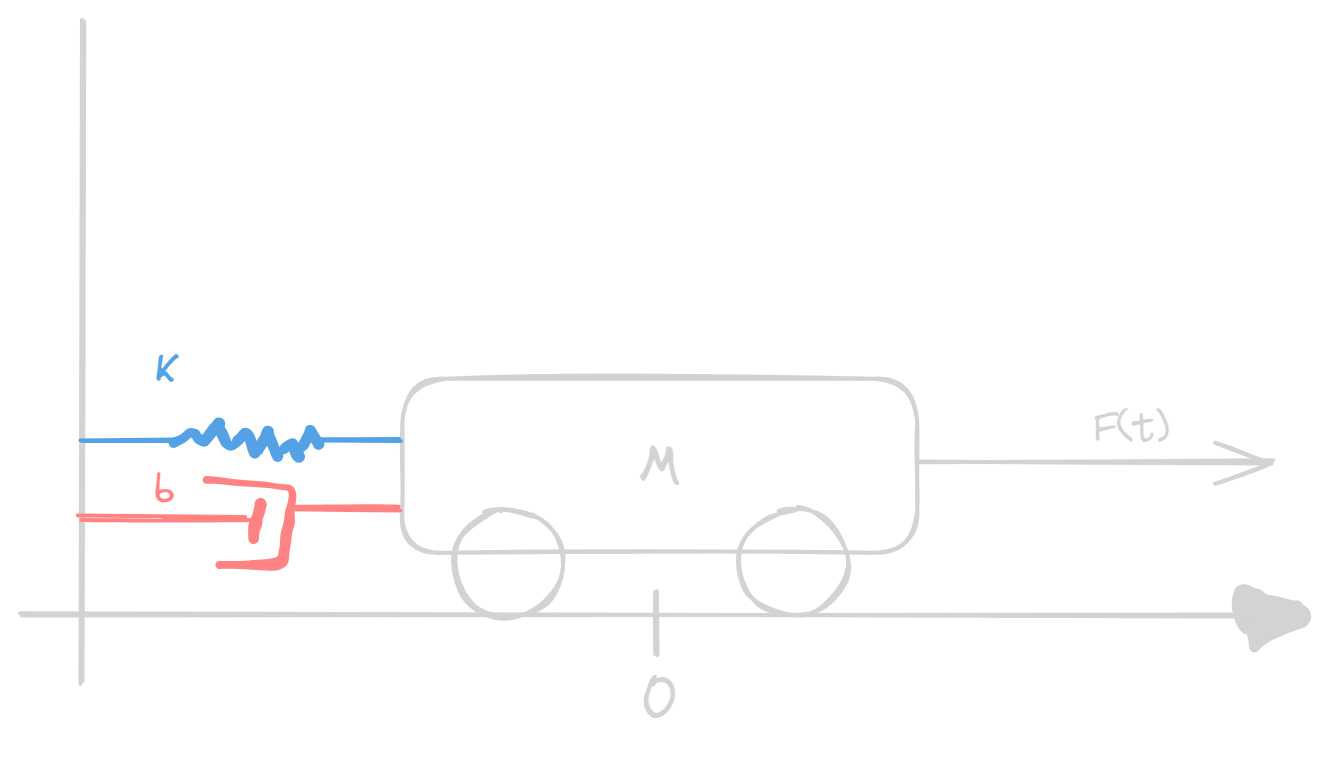
##### Formulas
- Spring: $\vec{F} = -k\vec{x}$
- Fluid Damper: $\vec{F_D} = -b \vec{\dot{x}}$
- Initial Force: $\vec{F_p}(t) = \vec{F_p}(t)$
- Total Force: $m \vec{\ddot{x}}(t) = \vec{F_p}(t) -b \vec{\dot{x}} -k\vec{x}$
> [!TIP]
>
> A rule of thumb is to have as many variables in our state as the max number
> of derivatives we encounter. In this case `2`
>
> Solve the equation for the highest derivative order
>
> Then, put all variables equal to the previous one derivated:
>
$$
x(t) = \begin{bmatrix}
x_1(t)\\
x_2(t) = \dot{x_1}(t)\\
\dots\\
x_n(t) = \dot{x}_{n-1}(t)
\end{bmatrix}
\;
\dot{x}(t) = \begin{bmatrix}
\dot{x_1}(t) = x_2(t)\\
\dot{x_2}(t) = x_3(t)\\
\dots\\
\dot{x}_{n-1}(t) = \dot{x}_{n}(t)\\
\dot{x}_{n}(t) = \text{our formula}
\end{bmatrix}
$$
Now in our state we may express `position` and `speed`, while in our
`next_state` we'll have `speed` and `acceleration`:
$$
x(t) = \begin{bmatrix}
x_1(t)\\
x_2(t) = \dot{x_1}(t)
\end{bmatrix}
\;
\dot{x}(t) = \begin{bmatrix}
\dot{x_1}(t) = x_2(t)\\
\dot{x_2}(t) = \ddot{x_1}(t)
\end{bmatrix}
$$
Our new state is then:
$$
\begin{cases}
\dot{x}_1(t) = x_2(t)\\
\dot{x}_2(t) = \frac{1}{m} \left( \vec{F}(t) - b x_2(t) - kx_1(t) \right)
\end{cases}
$$
let's say we only want to check for the `position` and `speed` of the system, our
State Space will be:
$$
A = \begin{bmatrix}
0 & 1 \\
- \frac{k}{m} & - \frac{b}{m} \\
\end{bmatrix}
B = \begin{bmatrix}
0 \\
\frac{1}{m} \\
\end{bmatrix}
C = \begin{bmatrix}
1 & 0 \\
0 & 1
\end{bmatrix}
D = \begin{bmatrix}
0
\end{bmatrix}
$$
let's say we only want to check for the `position` of the system, our
State Space will be:
$$
A = \begin{bmatrix}
0 & 1 \\
- \frac{k}{m} & - \frac{b}{m} \\
\end{bmatrix}
B = \begin{bmatrix}
0 \\
\frac{1}{m} \\
\end{bmatrix}
C = \begin{bmatrix}
1 & 0
\end{bmatrix}
D = \begin{bmatrix}
0
\end{bmatrix}
$$
> [!TIP]
> In order to being able to plot the $\vec{x}$ against the time, you need to
> multiply $\vec{\dot{x}}$ for the `time_step` and then add it to the state[^so-how-to-plot-ssr]
>
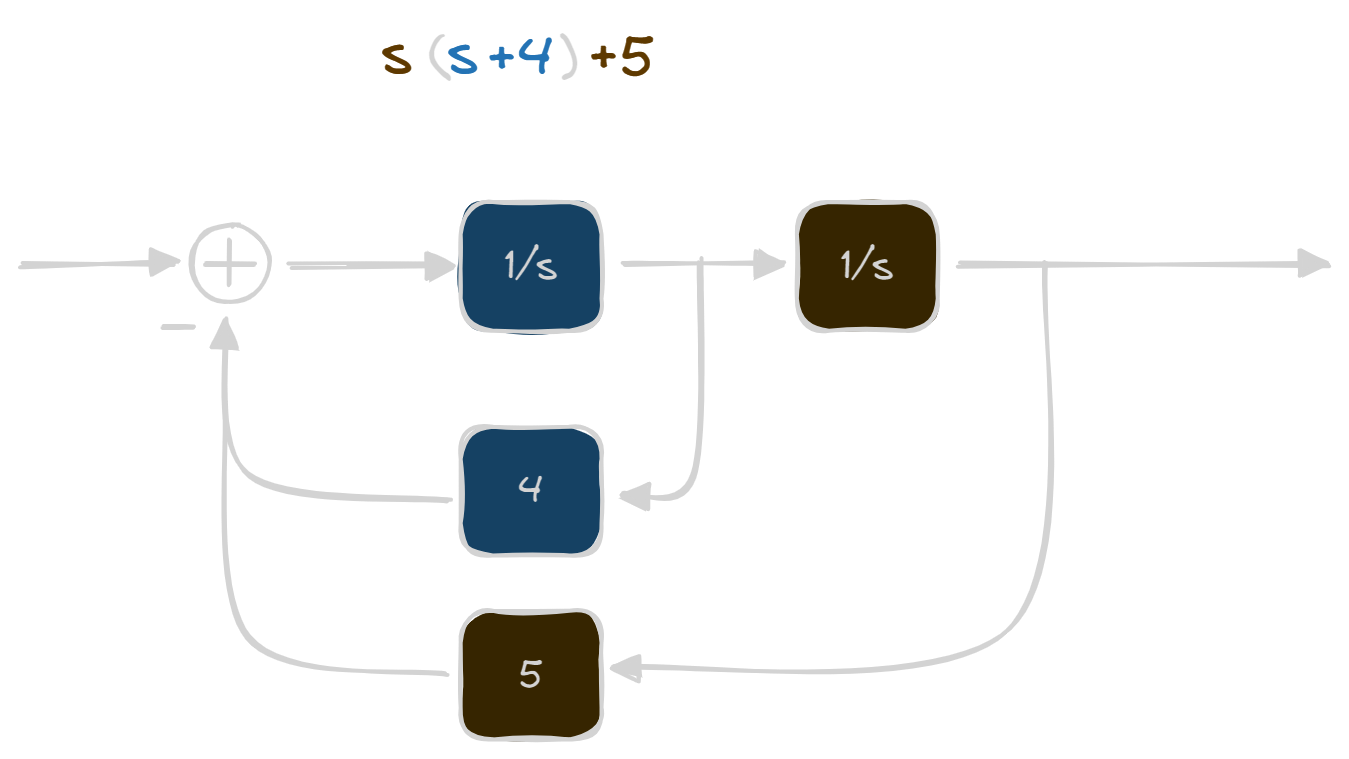
### Horner Factorization
let's say you have a complete polynomial of order `n`, you can factorize
in this way:
$$
\begin{align*}
p(s) &= s^5 + 4s^4 + 5s^3 + 2s^2 + 10s + 1 =\\
&= s ( s^4 + 4s^3 + 5s^2 + 2s + 10) + 1 = \\
&= s ( s (s^3 + 4s^2 + 5s + 2) + 10) + 1 = \\
&= s ( s (s (s^2 + 4s + 5) + 2) + 10) + 1 = \\
&= s ( s (s ( s (s + 4) + 5) + 2) + 10) + 1
\end{align*}
$$
If you were to take each s with the corresponding number in the parenthesis,
you'll make this block:
### Case Studies
- PAGERANK
- Congestion Control
- Video Player Control
- Deep Learning
[^so-how-to-plot-ssr]: [Stack Exchange | How to plot state space variables against time on unit step input? | 05 January 2025 ](https://electronics.stackexchange.com/questions/307227/how-to-plot-state-space-variables-against-time-on-unit-step-input)