12 KiB
Flow Models
In generative modelling, what we are trying to achive is a remap of a known distribution, like a Guassian, to another distribution, like colors of pixels in face images.
le't imagine now that all distributions live in the same space, a bit like cities. Our objective is to make our citizen move from a city to another, thus we need to find the right mapping.
Vector field of a flow
Caution
Here we talk about speed, position and velocity. This is just an analogy to make the learning process smoother.
Let's sary that we have a flow, which in this
context can be seen as the position function of \vec{x} at time t. The
associated vector field is simply:
v_{t}(\vec{x}) = \frac{d \,\varphi_t(\vec{x})}{d \, t}\bigg \rvert_{t= 0}
This means that our vector field, read here as velocity, is the derivative of
the flow, read as position, over time and evaluated at time t = 0. This means
that we just need to know x_0, as the position at t = 0 is the initial
position.
In particular, for the flow properties, we have that:
\begin{aligned}
\varphi_t{(\vec{x})} &= \vec{x}(t) \\
\varphi_0{(\vec{x})} &= \vec{x}_o \\
\frac{d \,\varphi_t(\vec{x}_0)}{d \, t} &= f(\varphi_t(\vec{x}_0))
\end{aligned}
The last holds as the vector field is in function of t, thus even \vec{x}
changes in function of time, and is equal to the flow.
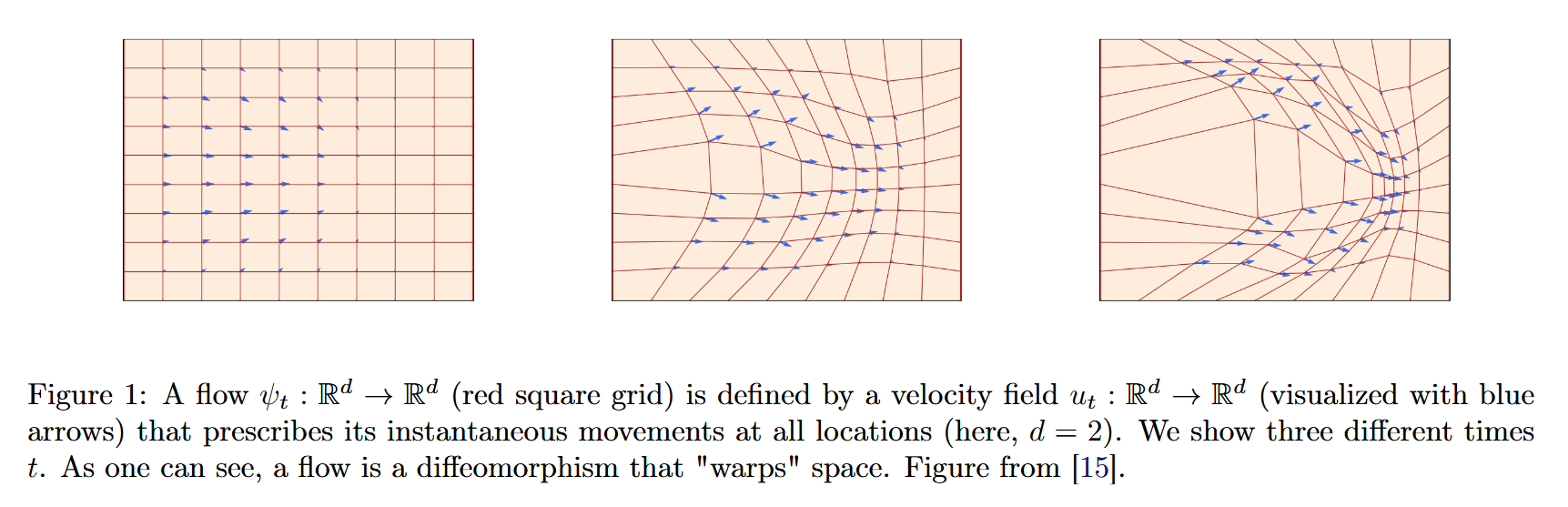
Image taken from An Introduction to Flow Matching and Diffusion Models
Note
As it is more evident by the image, the flow is basically a map of position of points. Since the position of each point changes over time, a flow warps space.
An interesting thing is that it gives us a snapshot of points are at time
t.Instead, the vector field
vgives us how these position will be modified in the next pictures, giving us the instant velocity of all points, allowing us to predict where points will move before taking the next snapshot.
Mapping distributions via flow
It follows that a velocity function v can take x to a probability p only
if it's flow goes there:
v_t \text{ generates } p_t \iff \mathcal{X}_t = \varphi_t(\mathcal{X}_0) \sim p_t
in other words, taken a random variable \mathcal{X_0}, we can say that is sampled
from p_t at time t only if it goes into its probability boundaries.
Normalizing Flows
It is a technique in which we try to find several simple flows that will
create a map of a distribution q to a distribution p.
Let's say that we want to learn a map T_W : q \rightarrow p, that we will call
T_W\#q pushforward of q by T, we would need to minimize a Kullback-Leibler
divergence:
\begin{aligned}
D_{KL}(T_W\#q || p) &= \int_x \frac{\log(p(x))}{\log(T_W\#q(x))} p(x) dx = \\
&= \underbrace{\int_x \log(p(x))p(x)\,dx}_\text{static, not controllable} -
\underbrace{\int_x \log(T_W\#q(x))p(x)\,dx}_\text{modifiable}
\end{aligned}
Since we can ignore the static part, conditioned by only the true distribution, we take only the second part, which is equal to the expected value. We discretize it and we get
\mathbb{E_{x \sim p}}[\log(\,T_W\#q(x)\,)] = \sum_{x} \log(\,T_W\#q(x)\,)p(x)
Guess what, we have all these values, and this is similar to the Negative Log Likelihood, so, with a bit of notation changing, we get:
Loss(X, Y) = - \sum_{i}^{N} \log(T_W(\vec{x})^{(i)})
The thing is that we can't compute this directly, as there's no ground truth we can use to guide this. So, let's rewrite this in terms by applying the change of variables we get that:
p(\vec{y}) = q(T_W^{-1}(\vec{y})) \cdot \bigg | J_{T_W^{-1}}(\vec{y})\bigg |
Since it's complicated to derive T_W because it must be invertible and
differential, this is simpler to achieve by composing T_W as
T_W = \varphi_K \circ \dots \varphi_1. However these flows lose expressivity
and they are complex to evaluate as K goes bigger.
Continuous Normalizing Flows
To solve the problem of expressivity, a solution is to solve the ODE with the euler method
Flow Matching
The idea is to train a velocity function that will bring us to the right distribution, and this is our flow matching. By treating it like an energy based model, we get:
E_t(\mathcal{X}_0, \mathcal{X}_1) =
|| v^W_t(\mathcal{X}_t) - v_t(\mathcal{X}_t) ||^2
Since we need our point to travel how we want it, we influence its velocity. Thus, by minimizing this error, we get the target trajectory.
However, there's a problem... We don't know v_t(\mathcal{X}_t) and we must
find a method to derive it
Midpoint Method (aka Modified Euler's method)
The actual algorithm from wikipedia is:
y_{n + 1} = y_{n} + hf\left(y_n + \frac{h}{2}f(y_n, t_n), t_n + \frac{h}{2}\right)
translated to code becomes:
# Technically its velocity, not speed
# velocity: vector
# speed: magnitude
def compute_speed(old_position: list[], current_time: float) -> list[]:
# this function is what
# we want to find
pass
def compute_new_position(
old_position: list[],
old_speed: list[],
current_time: float,
time_step: float
):
step = time_step / 2
half_point_speed = compute_speed(
old_position + step * old_speed,
time + step
)
new_pos = old_position + step * half_point_speed
return new_pos
Obviously we don't know what the speed function is, thus we just need to learn it. Now, inverting the formula we get that (with some abuse of notations) our target velocity in that point is:
f_{t + \frac{h}{2}} = \frac{y_{n + 1} - y_n}{h}
And since during training time we can compute this, as we have both
y_n and y_{n+1}, we just need to set h to an arbitrary value, say 1 and we
can easily compute this.
Now, we just need to learn the velocity function, and this is just the gradient descent of the difference between our learnt function and the computed one. Then, if we want to use an energy model, we get:
E_t(\mathcal{X}_0, \mathcal{X}_1) =
|| v^W_t(\mathcal{X}_t) - (\mathcal{X}_1 - \mathcal{X}_0) ||^2
Note
There's another method, applying Markov chains, though it's basically a flow matching with Euler's standard method where
h \rightarrow \inftyand so has multiple steps
Caution
This method is perfectly equivalent with using a conditional flow matching where
zis sampled from a dirac distribution (basically a Normal distribution with\sigma = 0)
Conditional Flow Matching
Now, let's say that we want to describe the velocity v in other ways, the problem
is that there isn't a unique path to go from q to p
GIF taken from https://dl.heeere.com/conditional-flow-matching/blog/conditional-flow-matching/
So the problem is now to describe this probability path over time. However we don't
know p analytic function, but just a bunch of data points sampled from it.
The idea to solve this is to define a probability path, read velocity, that is
conditioned by a variable z, conditioning variable, so that it is p(x | t, z),
so that, once we choose a particular z, we get a p(x | t) that brings x
from q to p and that has an analytic form.
The trick here is to find the probability p(x, t) by marginalizing over
p(x |t, z). In practice this means that we just have to sum (or integrate) over
all possible z values.
Since z is a random variable, a couple of techniques are one of sampling
from a Linear Interpolation, or from a conical gaussian path1
\text{Linear Interpolation} \\
\begin{cases}
\mu = (1 - t)\cdot x_q + t \cdot x_p \\
\sigma = 0 \\
p(x | t, z = (x_q, x_p)) = \mathcal{N}(\mu, \sigma^2 I) \\
\end{cases}
\\
\text{ }
\\
\text{Velocity} \rightarrow v(x, t) = x_p - x_q
\\
\text{ }
\\
\text{ }
\\
\text{Conical Gaussian Path} \\
\begin{cases}
\mu = t \cdot x_p \\
\sigma = (1 - t)^2 \\
p(x | t, z = (x_p)) = \mathcal{N}(\mu, \sigma^2 I) \\
\end{cases}
\\
\text{ }
\\
\text{Velocity} \rightarrow v(x, t) = \frac{x - x_p}{1 - t}
To find the velocity, it's possible to use the continuity equation
Conditional Optimal Flow
One thing that could happen during the construction of our paths is that they cross. To solve this problem, we may choose couples of data such that they are coupled. This means that they won't cross.
In practice we only use minibatch Optimal Transport as it's costly to compute
ReFlow
Technically speaking a reflow is nothing more than what we already saw in flow matching2. The difference lies in how we retrain the model and how we sample points.
We first train a model like in flow matching, and then we train another model where true labels are not provided. In fact the taget lables provided will come from our original model.
While we normally would think that our original model learnt corssing trajectories, this is not the case. Plus, a better sampling provided by chaning euler to 4th-order Runge-Kutta, we provide a better integration method.
By combining both techniques, our reflowed model will learn straighter trajectories.
Warning
It's not necessary that the 2 models are different or equal, nor you need to re-use the former model weights.
Guidance for generation
As for diffusion, we now know how to generate the target distribution, but what if the target distribution is the distribution of valid images and we want a picture of a dog?
Classifier Guidance
We could take our unconditioned model and use a classifier, plus another input used to guide, to change our model parameters (so, our velocity). However this means that we need a classifier that tells us if our generated output matches the label or not:
v_{W, t}(x | y) = v(x) + wb_t \nabla \log p_{Y |t}(y | x)
This means that our new velocity will be influenced by the weighted
conditioned probability of obtaining y starting from x. Now we don't need to
retrain our model from 0.
Since we are tuning 2 different models together, their magnitudes do not combine well, leading to potential problems. Moreover the classifier is not "perfect", so we need to consider its errors as well
Classifier Free Guidance
Instead of using a classifier, we can fine retrain our model to consider conditioning. Starting from the classifier equation for the velocity, we can demonstrate that:
u_{W, t}(x | y) = (1 - w)v(x) + w \cdot v(x | y)
Now, we can reuse the previous model and we will retrain it by passing
y = \emptyset \text{ or } y \in \mathcal{Y} with probability \eta for
being empty.
Once retrained, during inference can sample by using this formula, where
y = \emptyset if it comes from an unguided sampling and y \in \mathcal{Y} if
it's unguided.
d X_t = [(1 - w)v_{W, t}(X_t | \emptyset) + wv_{W, t}(X_t | y)] dt \\
w > 1
As you can notice, since w > 1, we are slowing the conditioned velocity with
the unconditioned velocity, that is dampened. Moreover, if the prompt is unconditioned,
this would be equal to the unmodified unconditional velocity.