5.3 KiB
Modern Control
Normally speaking, we know much about classical control, in the form of:
\dot{x}(t) = ax(t) + bu(t) \longleftrightarrow sX(s) - x(0) = aX(S) + bU(s)
With the left part being a derivative equation in continuous time, while the right being its tranformation in the complex domain field.
Note
\dot{x}(t) = ax(t) + bu(t) \longleftrightarrow x(k+1) = ax(k) + bu(k)These are equivalent, but the latter one is in discrete time.
A brief recap over Classical Control
Be Y(s) our output variable in classical control and U(s) our
input variable. The associated transfer function G(s) is:
G(s) = \frac{Y(s)}{U(s)}
Root Locus
Bode Diagram
Nyquist Diagram
State Space Representation
State Matrices
A state space representation has 4 Matrices: A, B, C, D with coefficients in
\R:
A: State Matrix[x_rows, x_columns]B: Input Matrix[x_rows, u_columns]C: Output Matrix[y_rows, x_columns]D: Direct Coupling Matrix[y_rows, u_columns]
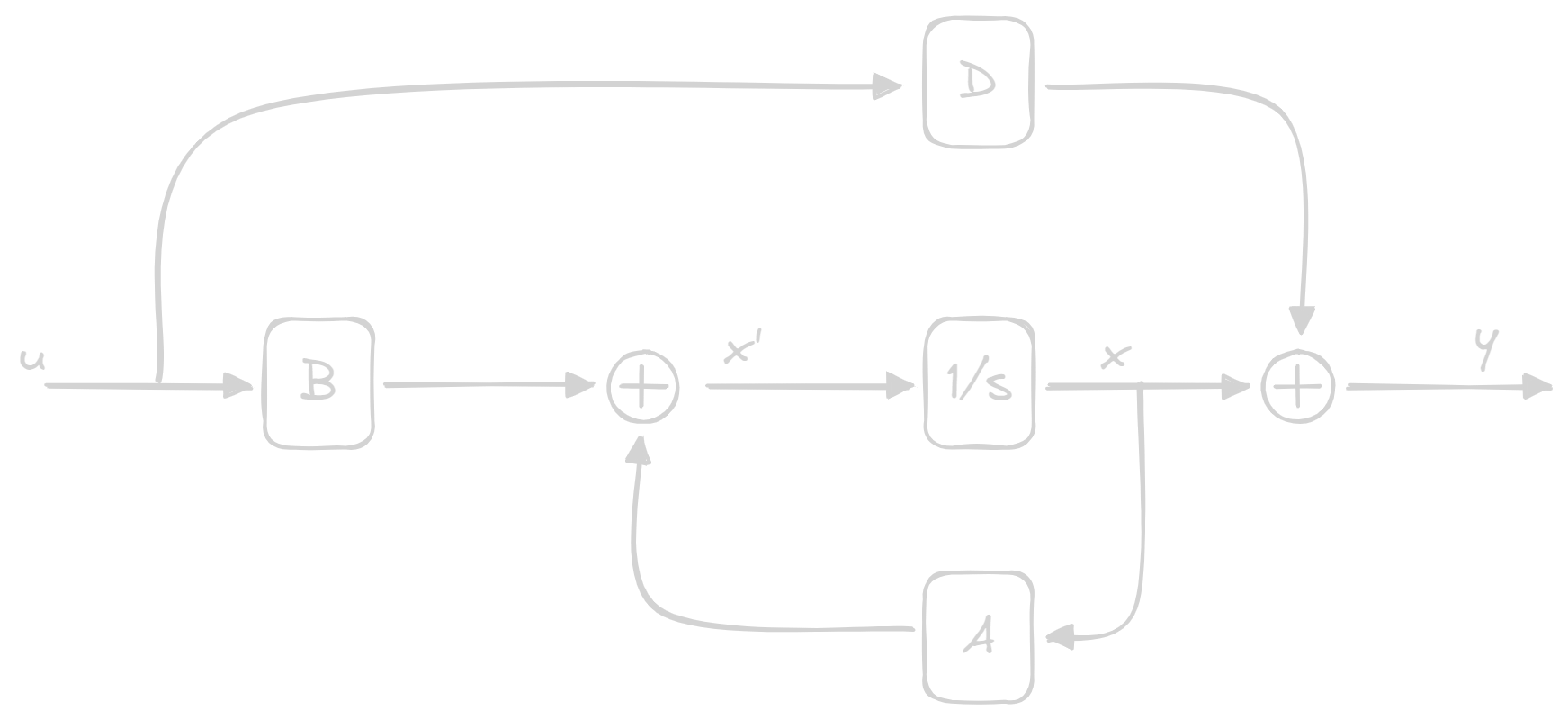
\begin{cases}
\dot{x}(t) = Ax(t) + Bu(t) \;\;\;\; \text{Dynamic of the system}\\
y(t) = C{x}(t) + Du(t) \;\;\;\; \text{Static of the outputs}
\end{cases}
This can be represented with the following diagrams:
Continuous Time:
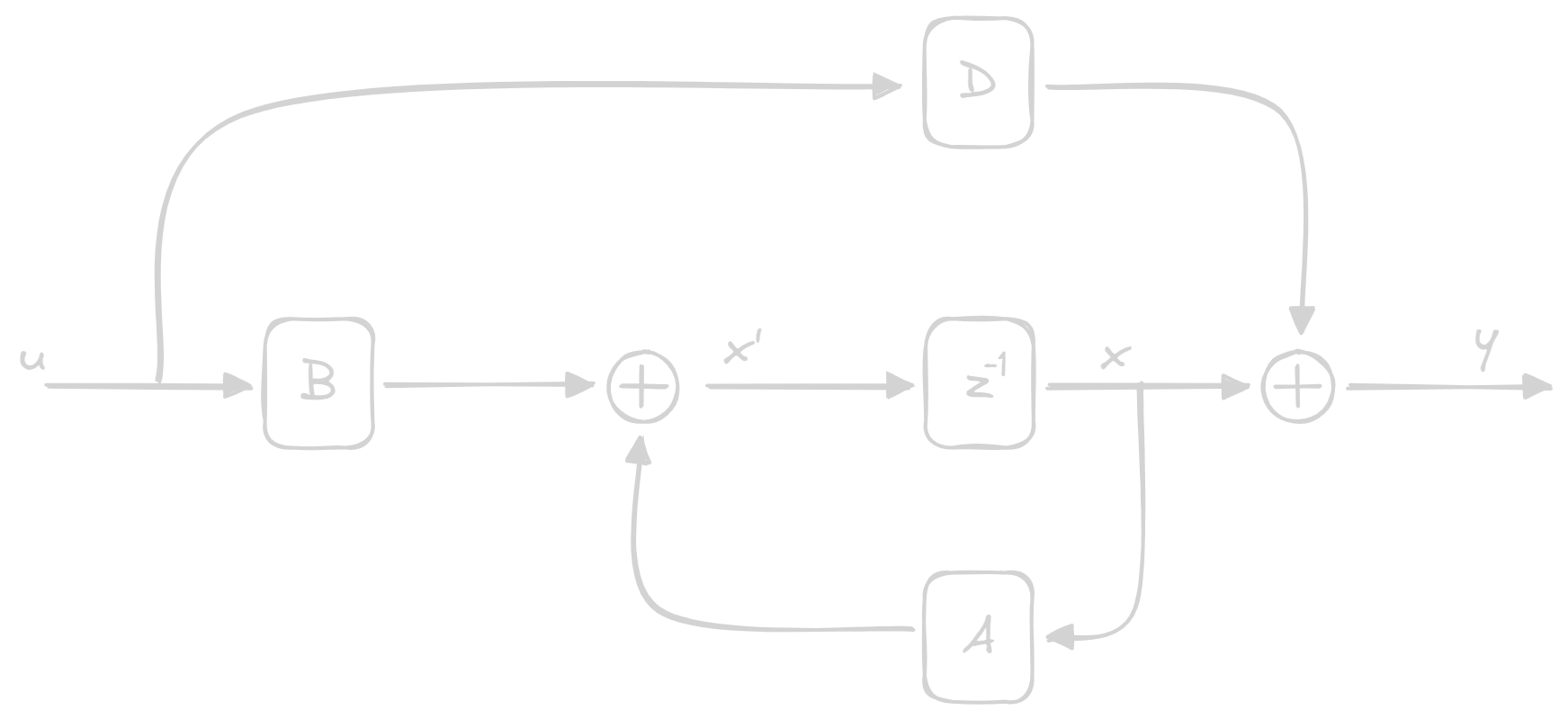
Discrete time:
State Vector
This is a state vector [x_rows, 1]:
x(t) = \begin{bmatrix}
x_1(t)\\
\dots\\
x_x(t)
\end{bmatrix}
\text{or} \:
x(k) = \begin{bmatrix}
x_1(k)\\
\dots\\
x_x(k)
\end{bmatrix}
Basically, from this we can know each next step of the state vector, represented as:
x(k + 1) = f\left(
x(k), u(k)
\right) = Ax(k) + Bu(k)
Examples
Cart attached to a spring and a damper, pulled by a force
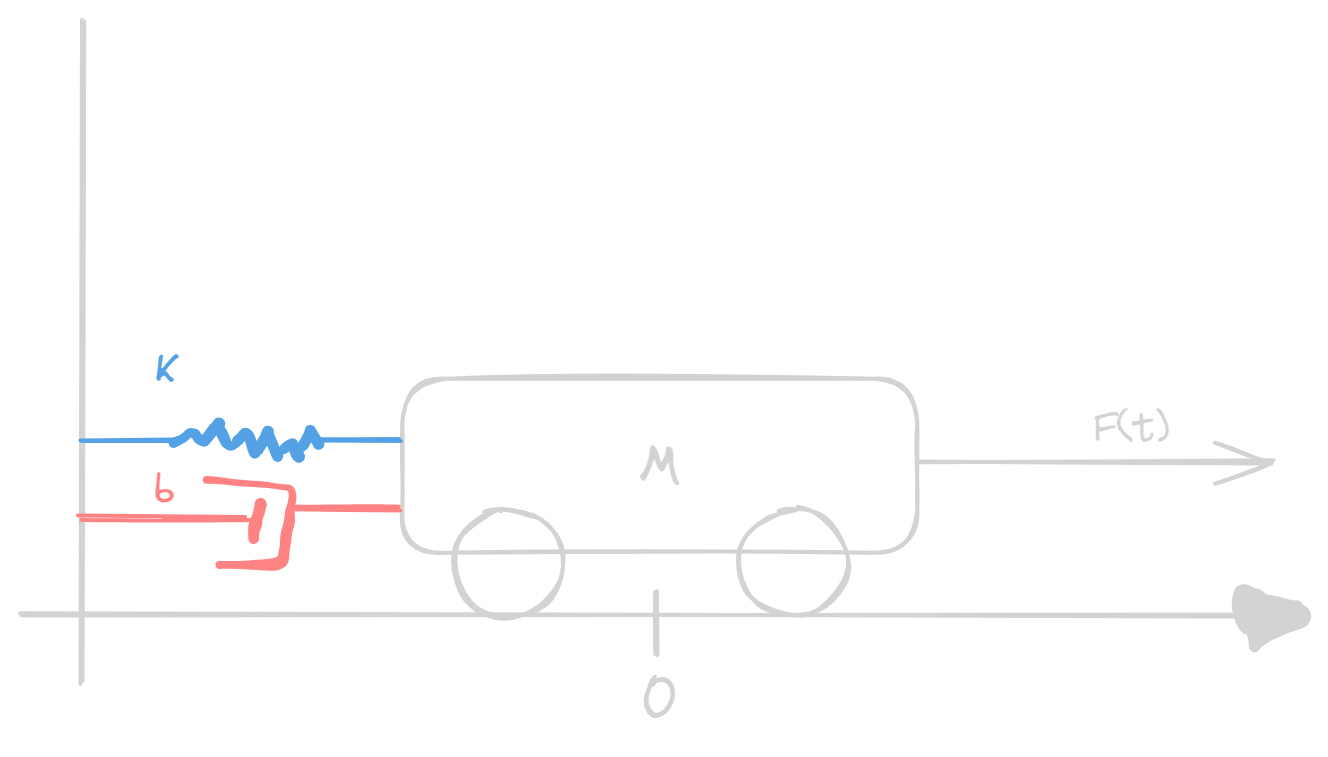
Formulas
- Spring: $\vec{F} = -k\vec{x}$
- Fluid Damper: $\vec{F_D} = -b \vec{\dot{x}}$
- Initial Force:
\vec{F_p}(t) = \vec{F_p}(t) - Total Force:
m \vec{\ddot{x}}(t) = \vec{F_p}(t) -b \vec{\dot{x}} -k\vec{x}
Tip
A rule of thumb is to have as many variables in our state as the max number of derivatives we encounter. In this case
2Solve the equation for the highest derivative order
Then, put all variables equal to the previous one derivated:
x(t) = \begin{bmatrix}
x_1(t)\\
x_2(t) = \dot{x_1}(t)\\
\dots\\
x_n(t) = \dot{x}_{n-1}(t)
\end{bmatrix}
\;
\dot{x}(t) = \begin{bmatrix}
\dot{x_1}(t) = x_2(t)\\
\dot{x_2}(t) = x_3(t)\\
\dots\\
\dot{x}_{n-1}(t) = \dot{x}_{n}(t)\\
\dot{x}_{n}(t) = \text{our formula}
\end{bmatrix}
Now in our state we may express position and speed, while in our
next_state we'll have speed and acceleration:
x(t) = \begin{bmatrix}
x_1(t)\\
x_2(t) = \dot{x_1}(t)
\end{bmatrix}
\;
\dot{x}(t) = \begin{bmatrix}
\dot{x_1}(t) = x_2(t)\\
\dot{x_2}(t) = \ddot{x_1}(t)
\end{bmatrix}
Our new state is then:
\begin{cases}
\dot{x}_1(t) = x_2(t)\\
\dot{x}_2(t) = \frac{1}{m} \left( \vec{F}(t) - b x_2(t) - kx_1(t) \right)
\end{cases}
let's say we only want to check for the position and speed of the system, our
State Space will be:
A = \begin{bmatrix}
0 & 1 \\
- \frac{k}{m} & - \frac{b}{m} \\
\end{bmatrix}
B = \begin{bmatrix}
0 \\
\frac{1}{m} \\
\end{bmatrix}
C = \begin{bmatrix}
1 & 0 \\
0 & 1
\end{bmatrix}
D = \begin{bmatrix}
0
\end{bmatrix}
let's say we only want to check for the position of the system, our
State Space will be:
A = \begin{bmatrix}
0 & 1 \\
- \frac{k}{m} & - \frac{b}{m} \\
\end{bmatrix}
B = \begin{bmatrix}
0 \\
\frac{1}{m} \\
\end{bmatrix}
C = \begin{bmatrix}
1 & 0
\end{bmatrix}
D = \begin{bmatrix}
0
\end{bmatrix}
Tip
In order to being able to plot the
\vec{x}against the time, you need to multiply\vec{\dot{x}}for thetime_stepand then add it to the state1
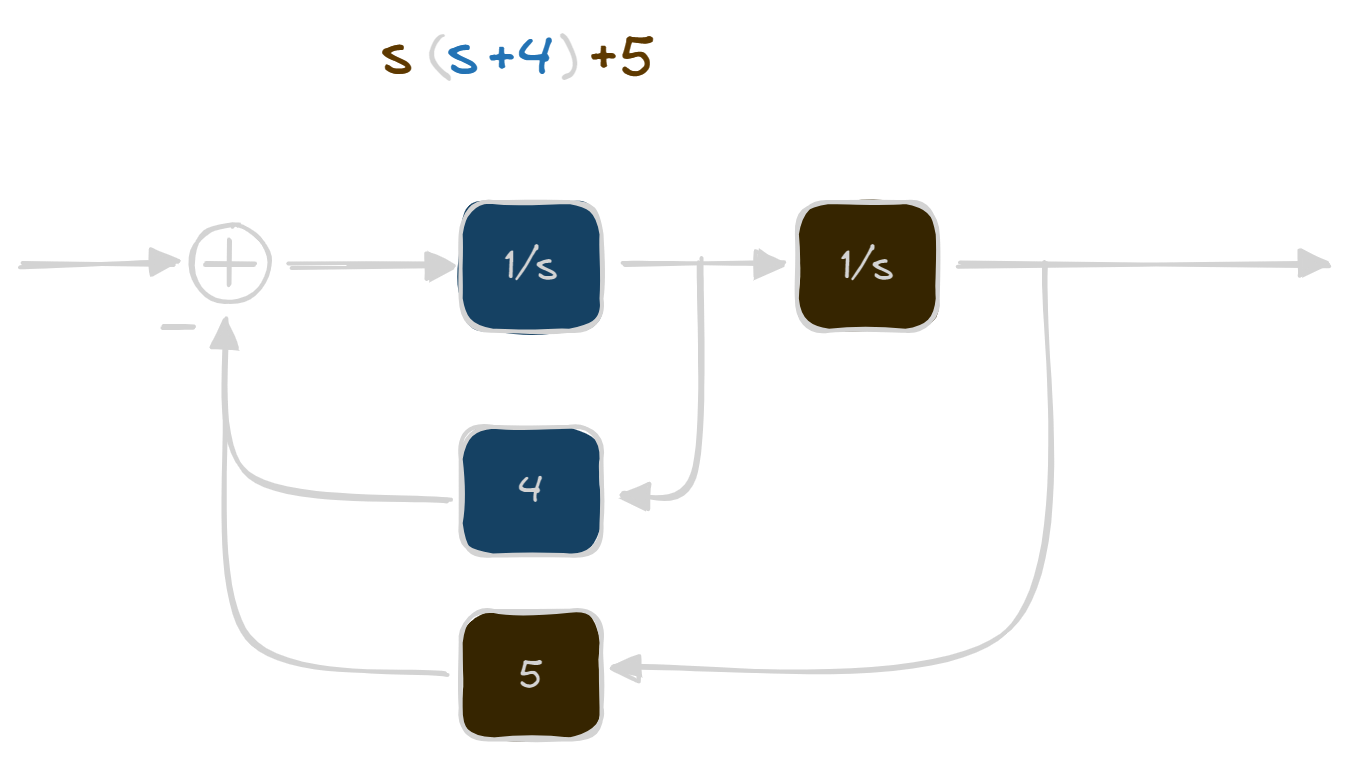
Horner Factorization
let's say you have a complete polynomial of order n, you can factorize
in this way:
\begin{align*}
p(s) &= s^5 + 4s^4 + 5s^3 + 2s^2 + 10s + 1 =\\
&= s ( s^4 + 4s^3 + 5s^2 + 2s + 10) + 1 = \\
&= s ( s (s^3 + 4s^2 + 5s + 2) + 10) + 1 = \\
&= s ( s (s (s^2 + 4s + 5) + 2) + 10) + 1 = \\
&= s ( s (s ( s (s + 4) + 5) + 2) + 10) + 1
\end{align*}
If you were to take each s with the corresponding number in the parenthesis,
you'll make this block:
Case Studies
- PAGERANK
- Congestion Control
- Video Player Control
- Deep Learning