4.9 KiB
Relation to Classical Control
A Brief Recap of Discrete Control
Let's say we want to control something Physical, hence intrinsically
time continuous, we can model our control in the z domain and make our
G_c(z). But how do we connect these systems:
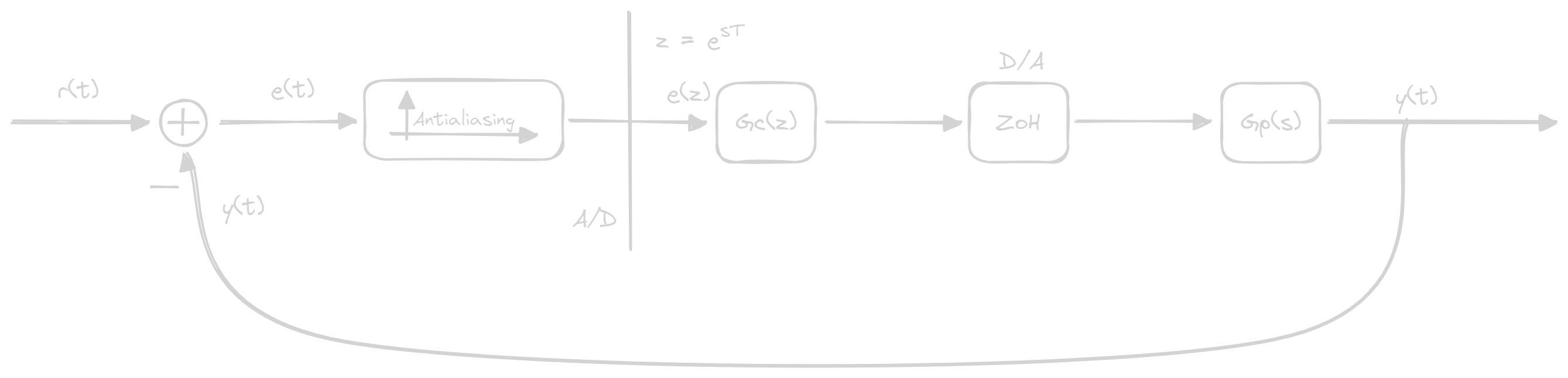
Contraints
T_s: Sampling timef_s \geq 2f_m: Sampling Frequency must be at least 2 times the max frequency of the system
Parts of the system
- Take
referenceandoutputand compute theerror - Pass this signal into an
antialiasing filterto avoid aliases - Trasform the
Laplace Transformin aZ-Transformby using the following relation:
z = e^{sT} - Control everything through a
control blockengineered throughdigital control - Transform the
digital signalto ananalogic signalthrough the use of aholder(in this case azero order holder) - Pass the signal to our
analogic plant(which is our physical system) - Take the
outputand pass it inretroaction
Zero Order Holder
It has the following formula:
ZoH = \frac{1}{s} \left( 1 - e^{sT}\right)
Commands:
c2d(sysc, Ts [, method | opts] )1: ConvertsLTIsystems intoDiscreteones
Relation between S(A, B, C, D) to G(s)
From S(A, B, C, D) to G(s)
Be this our S(A, B, C, D) system:
\begin{cases}
\dot{x}(t) = Ax(t) + Bu(t) \;\;\;\; \text{Dynamic of the system}\\
y(t) = C{x}(t) + Du(t) \;\;\;\; \text{Static of the outputs}
\end{cases}
now let's make from this a Laplace Transform:
\begin{align*}
& \begin{cases}
sX(s) - x(0)= AX(s) + BU(s) \\
Y(s) = CX(s) + DU(s)
\end{cases} \longrightarrow && \text{Normal Laplace Transformation}\\
& \longrightarrow
\begin{cases}
sX(s) = AX(s) + BU(s) \\
Y(s) = CX(s) + DU(s)
\end{cases} \longrightarrow && \text{Usually $x(0)$ is 0}\\
& \longrightarrow
\begin{cases}
X(s) \left(sI -A \right) =BU(s) \\
Y(s) = CX(s) + DU(s)
\end{cases} \longrightarrow && \text{$sI$ is technically equal to $s$}\\
& \longrightarrow
\begin{cases}
X(s) = \left(sI - A\right)^{-1}BU(s) \\
Y(s) = CX(s) + DU(s)
\end{cases} \longrightarrow && \\
& \longrightarrow
\begin{cases}
X(s) = \left(sI - A\right)^{-1}BU(s) \\
Y(s) = C\left(sI - A\right)^{-1}BU(s) + DU(s)
\end{cases} \longrightarrow && \text{Substitute for $X(s)$}\\
& \longrightarrow
\begin{cases}
X(s) = \left(sI - A\right)^{-1}BU(s) \\
Y(s) = \left(C\left(sI - A\right)^{-1}B + D\right)U(s)
\end{cases} \longrightarrow && \text{Group for $U(s)$}\\
& \longrightarrow
\begin{cases}
X(s) = \left(sI - A\right)^{-1}BU(s) \\
\frac{Y(s)}{U(s)} = \left(C\left(sI - A\right)^{-1}B + D\right)
\end{cases} \longrightarrow && \text{Get $G(s)$ from definition}\\
\longrightarrow \;& G(s) = \left(C\left(sI - A\right)^{-1}B + D\right) &&
\text{Formal definition of $G(s)$}\\
\end{align*}
Properties
-
Since
G(s)can be technically a matrix, this may represent aMIMO System -
The system is always
proper(so it's denominator is of an order higher of the numerator) -
If
Dis0, then the system isstrictly properand realizable -
While each
S(A_i, B_i, C_i, D_i)can be transformed into a singleG(s), this isn't true viceversa. -
Any particular
S(A_a, B_a, C_a, D_a)is calledrealization -
det(sI - A):= Characteristic Polinome -
det(sI - A) = 0:= Characteristic Equation -
eig(A):= Solutions of the Characteristic Equation andpolesof the system -
If the system is
SISOand this means thatC \in \R^{1,x},B \in \R^{x,1}andD \in \R, meaning that:
\begin{align*}
G(s) &= \left(C\left(sI - A\right)^{-1}B + D\right) =\\
&= \left(C \frac{Adj\left(sI - A\right)}{det\left(sI - A\right)}B + D\right)
= && \text{Decompose the inverse in its formula}\\
&= \frac{n(s)}{det\left(sI - A\right)} \in \R
\end{align*}
Note
As you can see here, by decomposing the inverse matrix in its formula it's easy to see that the divisor is a
scalar, anumber.Moreover, because of how
BandCare composed, the result of this Matrix multiplication is ascalartoo, hence we can write this as a single formula.Another thing to notice, regardless if this is a
MIMOorSISOsystem is that at the divisor we have alleigenvaluesof A aspolesby definition
Transforming a State-Space into Another one
We basically need to use some non singular Permutation Matrices:
\begin{align*}
&A_1, B_1, C_1, D_1 \\
&A_2 = PAP^{-1} \\
&B_2 = PB \\
&C_2 = CP^{-1} \\
&D_2 = D_1
\end{align*}