2.3 KiB
2.3 KiB
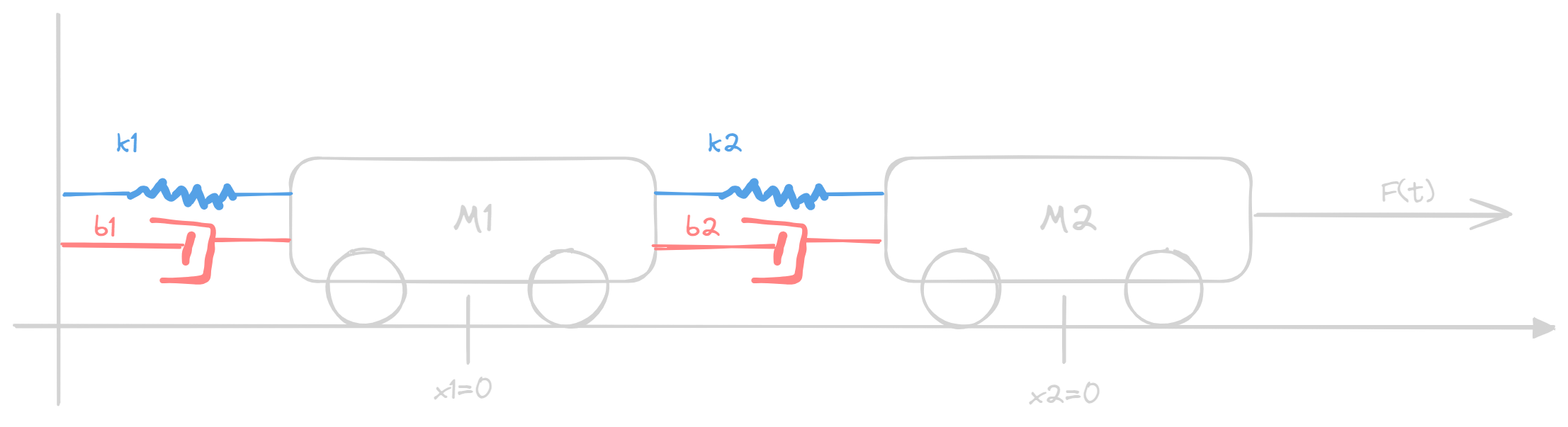
Example 3
Double Mass Cart
Formulas
-
Resulting forces for cart 1:
$ m_1 \ddot{p}_1 = k_2(p_2 - p_1) + b_2( \dot{p}_2 - \dot{p}_1) - k_1 p_1 - b_1 \dot{p}_1 $ -
Resulting forces for cart 2:
$ m_2 \ddot{p}_2 = F - k_2(p_2 - p_1) - b_2( \dot{p}_2 - \dot{p}_1) $
Reasoning
We now have 2 different accelerations. The highest order of derivatives is 2 for
2 variables, hence we need 4 variables in the state:
x = \begin{bmatrix}
x_1 = p_1\\
x_2 = p_2\\
x_3 = \dot{p}_1\\
x_4 = \dot{p}_2
\end{bmatrix}
\dot{x} = \begin{bmatrix}
\dot{x}_1 = \dot{p}_1 = x_3 \\
\dot{x}_2 = \dot{p}_2 = x_4\\
\dot{x}_3 = \ddot{p}_1 =
\frac{1}{m_1} \left[ k_2(x_2 - x_1) + b_2( x_4 - x_3) -
k_1 x_1 - b_1 x_3 \right]\\
\dot{x}_4 = \ddot{p}_2 =
\frac{1}{m_2} \left[ F - k_2(x_2 - x_1) - b_2( x_4 - x_3) \right]\\
\end{bmatrix}
Let's write our S(A, B, C, D):
A = \begin{bmatrix}
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1 \\
% 3rd row
- \frac{k_2 - k_1}{m_1} &
\frac{k_2}{m_1} &
-\frac{b_2 + b_1}{m_1} &
\frac{b_2}{m_1} \\
% 4th row
\frac{k_2}{m_12} &
- \frac{k_2}{m_2} &
\frac{b_2}{m_2} &
- \frac{b_2}{m_2} \\
\end{bmatrix}
B = \begin{bmatrix}
0 \\
0 \\ 0 \\ 1
\end{bmatrix}
C = \begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & 1 & 0 & 0
\end{bmatrix}
D = \begin{bmatrix}
0
\end{bmatrix}
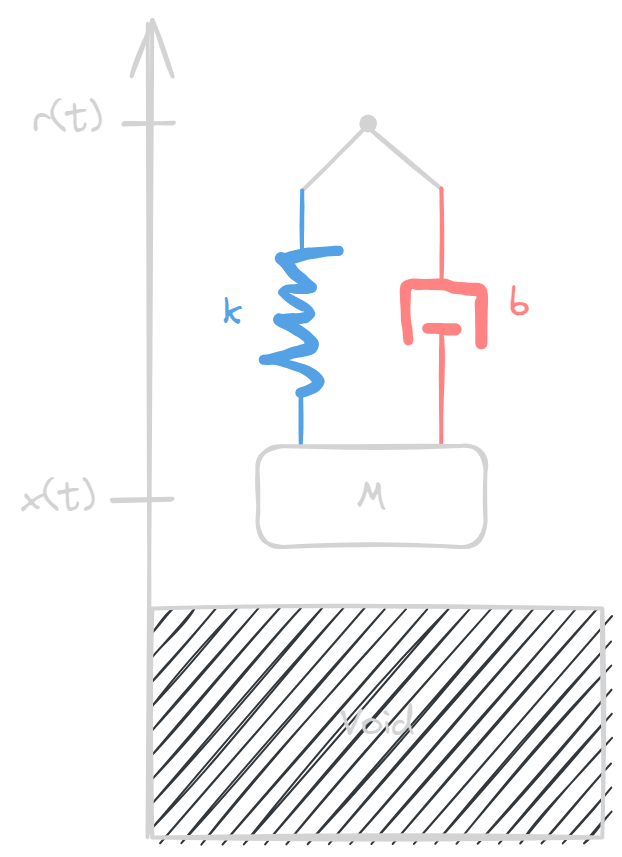
Suspended Mass
Note
For those of you the followed CNS course, refer to professor PDF for this excercise, as it has some unclear initial conditions
However, in the formulas section, I'll take straight up his own
Formulas
- Resulting forces for mass:
$ m \ddot{p} = -k(p - r) -b(\dot{p} - \dot{r}) $
Reasoning
x = \begin{bmatrix}
x_1 = p \\
x_2 = \dot{x}_1
\end{bmatrix}
\dot{x} = \begin{bmatrix}
\dot{x}_1 = x_2 \\
\dot{x}_2 = \frac{1}{m} \left[-k(x_1 - r) -b(x_2 - \dot{r}) \right]
\end{bmatrix}
Warning
Info here are wrong
Let's write our S(A, B, C, D):
A = \begin{bmatrix}
0 & 1\\
-\frac{k}{m} & - \frac{b}{m}
\end{bmatrix}
B = \begin{bmatrix}
0 \\
\frac{k + sb}{m}
\end{bmatrix}
C = \begin{bmatrix}
1 & 0
\end{bmatrix}
D = \begin{bmatrix}
0 & 0
\end{bmatrix}